
Композиция
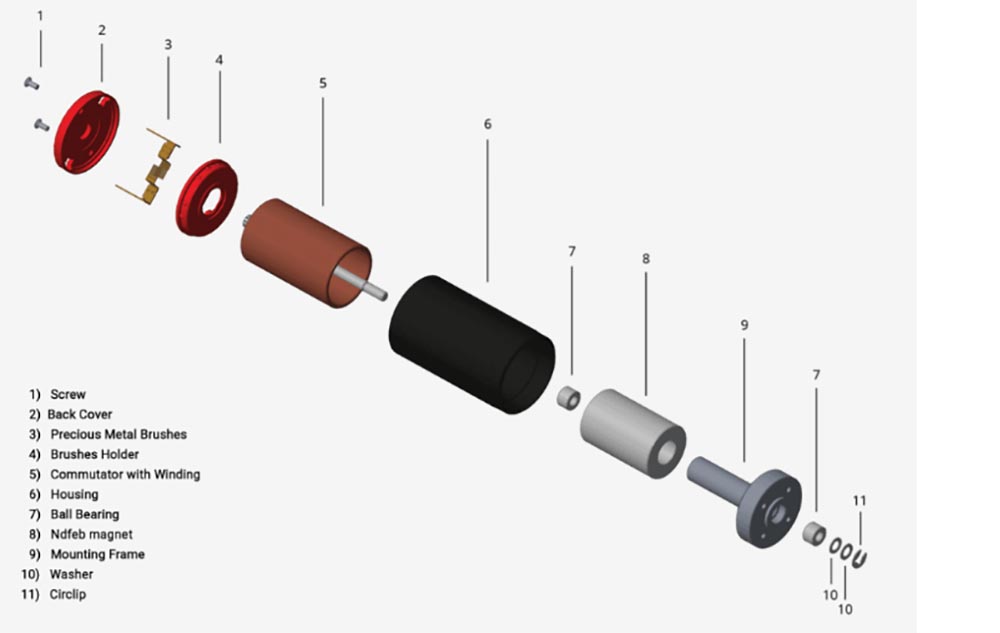
1. Двигатель постоянного тока с постоянными магнитами:
Он состоит из полюсов статора, роторов, щеток, корпусов и т. д.
Полюса статора изготавливаются из постоянных магнитов (стали с постоянными магнитами), феррита, алнико, неодима, железа, бора и других материалов. По своей конструкции они делятся на несколько типов, таких как цилиндрический и плиточный.
Ротор обычно изготавливается из ламинированных листов кремниевой стали, а эмалированная проволока наматывается между двумя пазами сердечника ротора (в трех пазах три обмотки), при этом соединения привариваются к металлическим листам коммутатора.
Щетка — это проводящая деталь, соединяющая источник питания и обмотку ротора, обладающая двумя свойствами: проводимостью и износостойкостью. В двигателях с постоянными магнитами используются однослойные металлические щетки, металлографитовые щетки и электрохимические графитовые щетки.
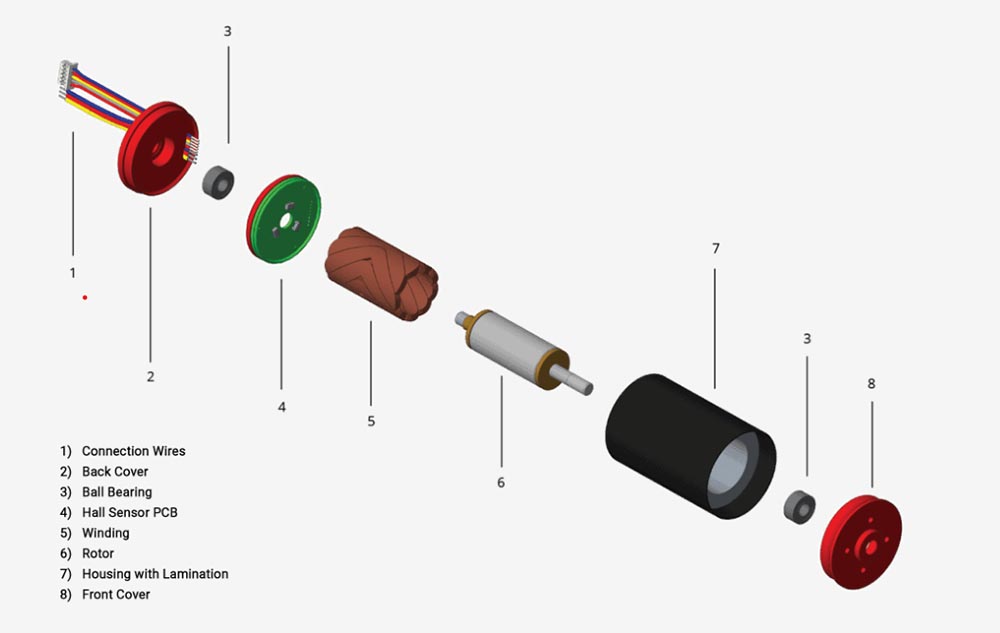
2. Бесщеточный двигатель постоянного тока:
Он состоит из ротора с постоянными магнитами, многополюсного статора с обмоткой, датчика положения и т. д. Бесщеточный двигатель постоянного тока отличается отсутствием щеток и использует полупроводниковые переключающие устройства (такие как элементы Холла) для осуществления электронной коммутации, то есть электронные переключающие устройства заменяют традиционные контактные коммутаторы и щетки. Он обладает преимуществами высокой надежности, отсутствия искрообразования при коммутации и низкого уровня механического шума.
Датчик положения коммутирует ток обмотки статора в определенной последовательности в соответствии с изменением положения ротора (то есть, определяет положение магнитного полюса ротора относительно обмотки статора и генерирует сигнал определения положения в заданном положении, который обрабатывается схемой преобразования сигнала, а затем выводится из схемы управления силовым выключателем и переключает ток обмотки в соответствии с определенной логической схемой).

2. Бесщеточный двигатель постоянного тока:
Он состоит из ротора с постоянными магнитами, многополюсного статора с обмоткой, датчика положения и т. д. Бесщеточный двигатель постоянного тока отличается отсутствием щеток и использует полупроводниковые переключающие устройства (такие как элементы Холла) для осуществления электронной коммутации, то есть электронные переключающие устройства заменяют традиционные контактные коммутаторы и щетки. Он обладает преимуществами высокой надежности, отсутствия искрообразования при коммутации и низкого уровня механического шума.
Датчик положения коммутирует ток обмотки статора в определенной последовательности в соответствии с изменением положения ротора (то есть, определяет положение магнитного полюса ротора относительно обмотки статора и генерирует сигнал определения положения в заданном положении, который обрабатывается схемой преобразования сигнала, а затем выводится из схемы управления силовым выключателем и переключает ток обмотки в соответствии с определенной логической схемой).
3. Высокоскоростной бесщеточный двигатель с постоянными магнитами:
Он состоит из статорного сердечника, ротора из магнитной стали, солнечной шестерни, тормозной муфты, ступичного кожуха и т. д. Для измерения скорости на крышке двигателя может быть установлен датчик Холла.
Сравнение коллекторных и бесколлекторных двигателей
Разница в принципе электрификации между коллекторным и бесколлекторным двигателем: в коллекторном двигателе коммутация осуществляется механически с помощью угольной щетки и коммутатора. В бесколлекторном двигателе коммутация осуществляется электронным способом с помощью контроллера, работающего на основе индукционного сигнала.
Принцип работы коллекторных и бесколлекторных двигателей различен, как и их внутренняя структура. У ступичных двигателей отличается режим передачи крутящего момента (замедляется ли он редуктором) и их механическая конструкция.
бесколлекторный двигатель постоянного тока
бесщеточный двигатель постоянного тока
Дата публикации: 03.06.2019